
 原华
原华 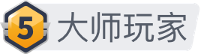

360全景安装和拼接
硬件如何安装?
1、安装前准备
标定布一套(5000mmx1200mm或1600mmx1200mm)
7.5M 卷尺一把:用于测量标定布的相关距离
专用工具箱一套:内含打孔器、撬板、美工刀等用于摄像头布线和车身拆装的专业工具

2、摄像头安装
摄像头安装具体原则如下:
- 左右镜头垂直斜角大于25°,小于45°。
- 左右镜头装位于后视镜下平整中间部分,左右要求对称。安装点应与前燕子板凸出面平齐

3.前后视摄像头尽可能安装居中较高位置,尽可能减少四颗摄像头的高度差异。角度水平下斜30度为宜,摄像头安装 离地高度最低不能低于40cm。
4.前后视摄像头玻璃面要平于前后车体的凸出位置,避免镜头凹入车体,增加视角盲区。

5.四个摄像头安装完成后,可通过四分屏图像对摄像头位置和角度进行调整,以便达到最佳的角度效果.为拼接质量达到最优,请确保在摄像头矫正的四个摄像头单成像时,图像处于屏幕的正中心,四周暗角分布均匀
6.侧视摄像头垂直冲下安装,可使用180-190横角镜头(8255、3011、6007、8077),侧视摄像头斜角30度冲外安装,最好使用210-220横角镜头(6001、3019)
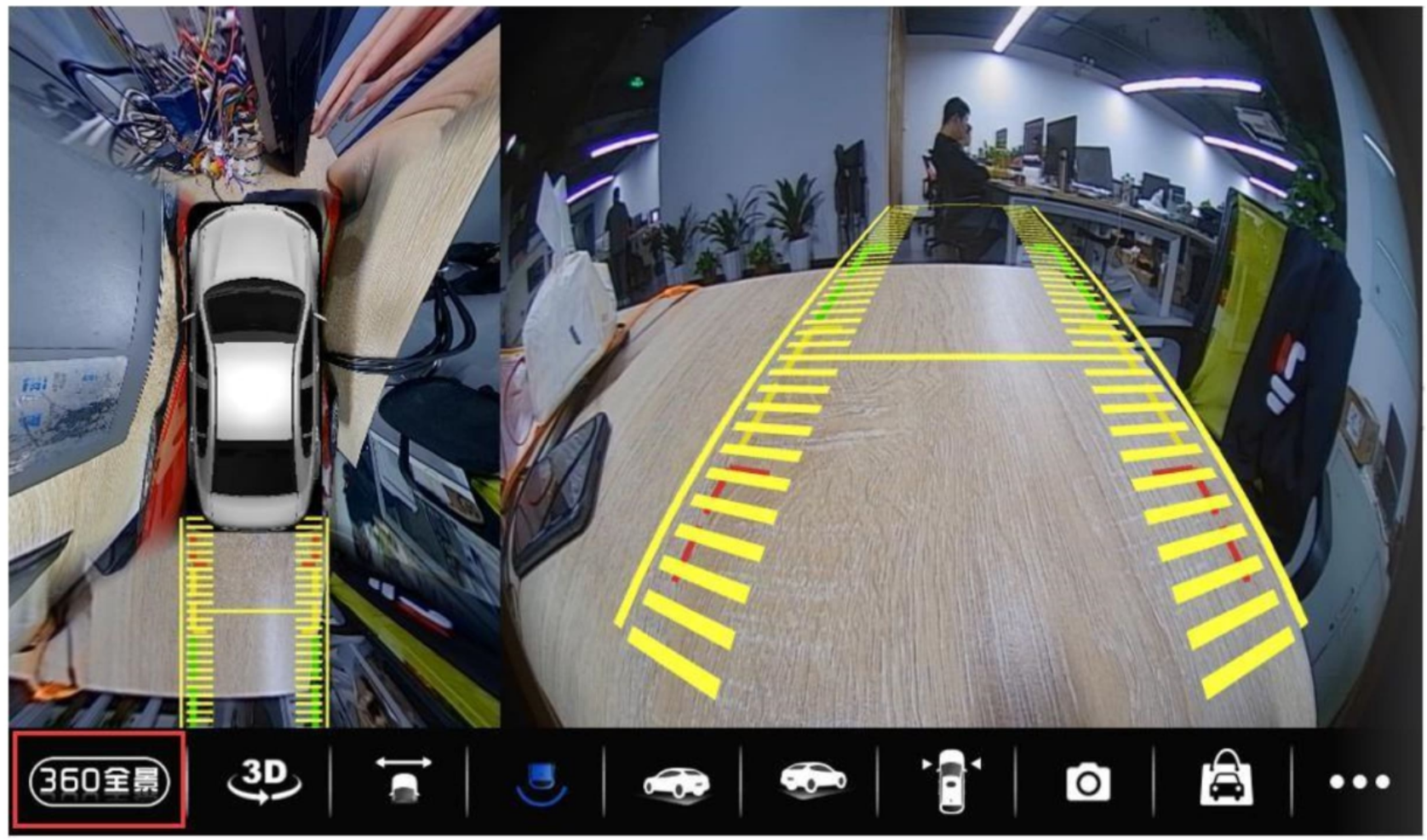
360全景拼接如何拼接?
如图:地面上的线曲折弯曲,则说明没有拼接好,需要重新拼接
那么,拼接的步骤是怎么样的?

以此次拼接方法为例:
场地要求:地面平整,光线均匀,无风,场地尺寸,长8M,宽5M,拼接过程标定布范围内无障碍物遮挡;
1.7.5M卷尺1把,用于测量车间距和前偏移的距离;
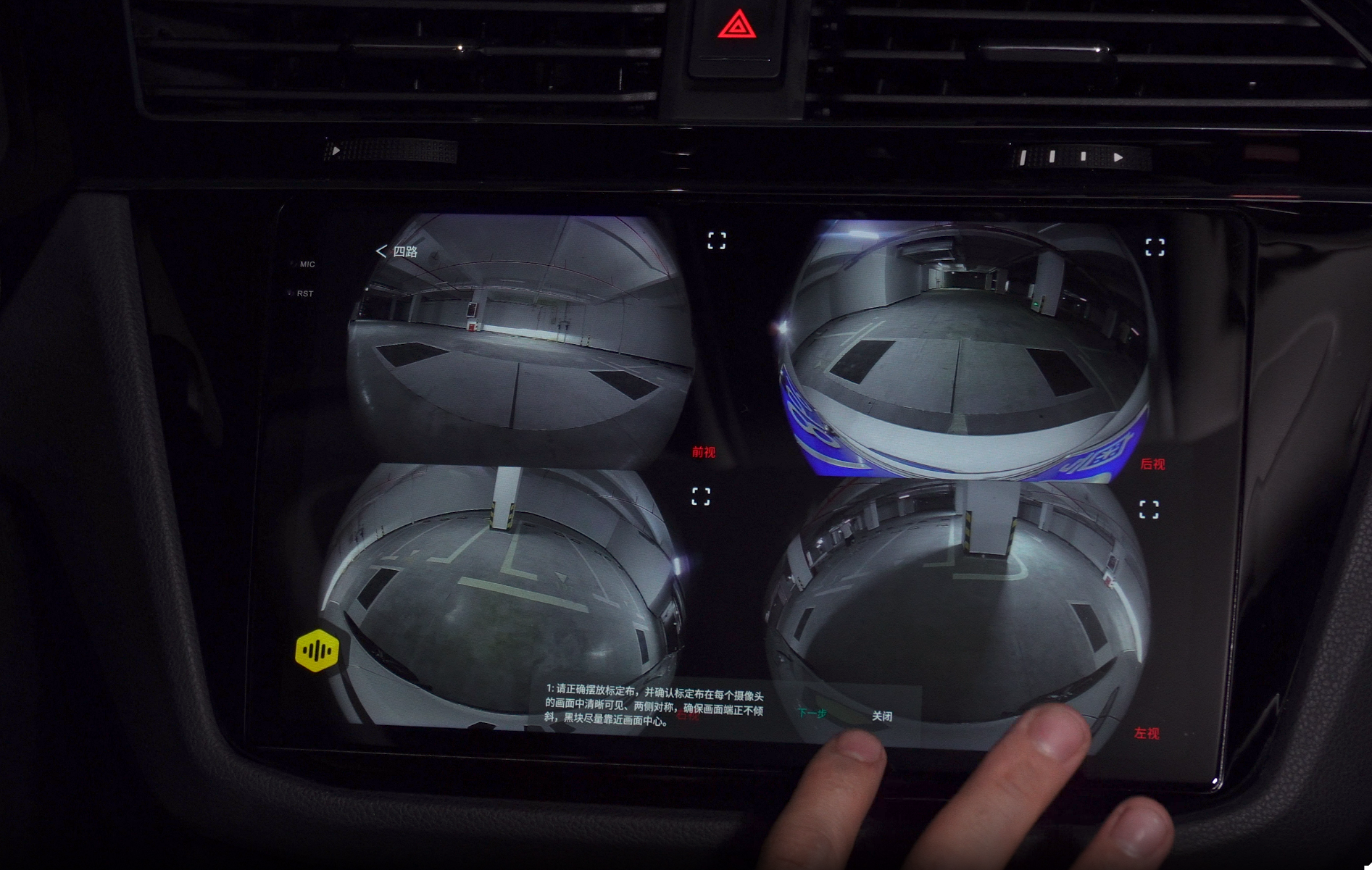
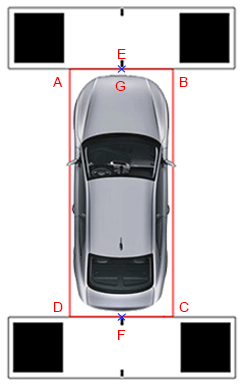
2.按照模式2提示摆好调试布,前后调试布中心点与车身正中对齐,固定好不让风吹歪。前后调试布边缘距离车头车尾约30 cm;

3.通过360软件拼接调试中的四分屏确认摄像头安装是否正确,调试布放置是否合理

A. 保证车机左右视图像与实车左右视镜一致(看下图前后左右后视镜的分布,并让人移动实际确认下)。
B. 保证左右视镜的车头部分要对齐,
C. 保证左右摄像头前后都能够照到两边的车身并车身侧面平行,保证左右视能看全调试布(前、后)并且前后布在成像上对称分布。
D. 保证前后摄像头画面没有上下颠倒,没有倾斜,左右摄像头的画面中,车身处于画面的下方
保证标定布上没有明显的阴影、水渍或杂物,黑白分明
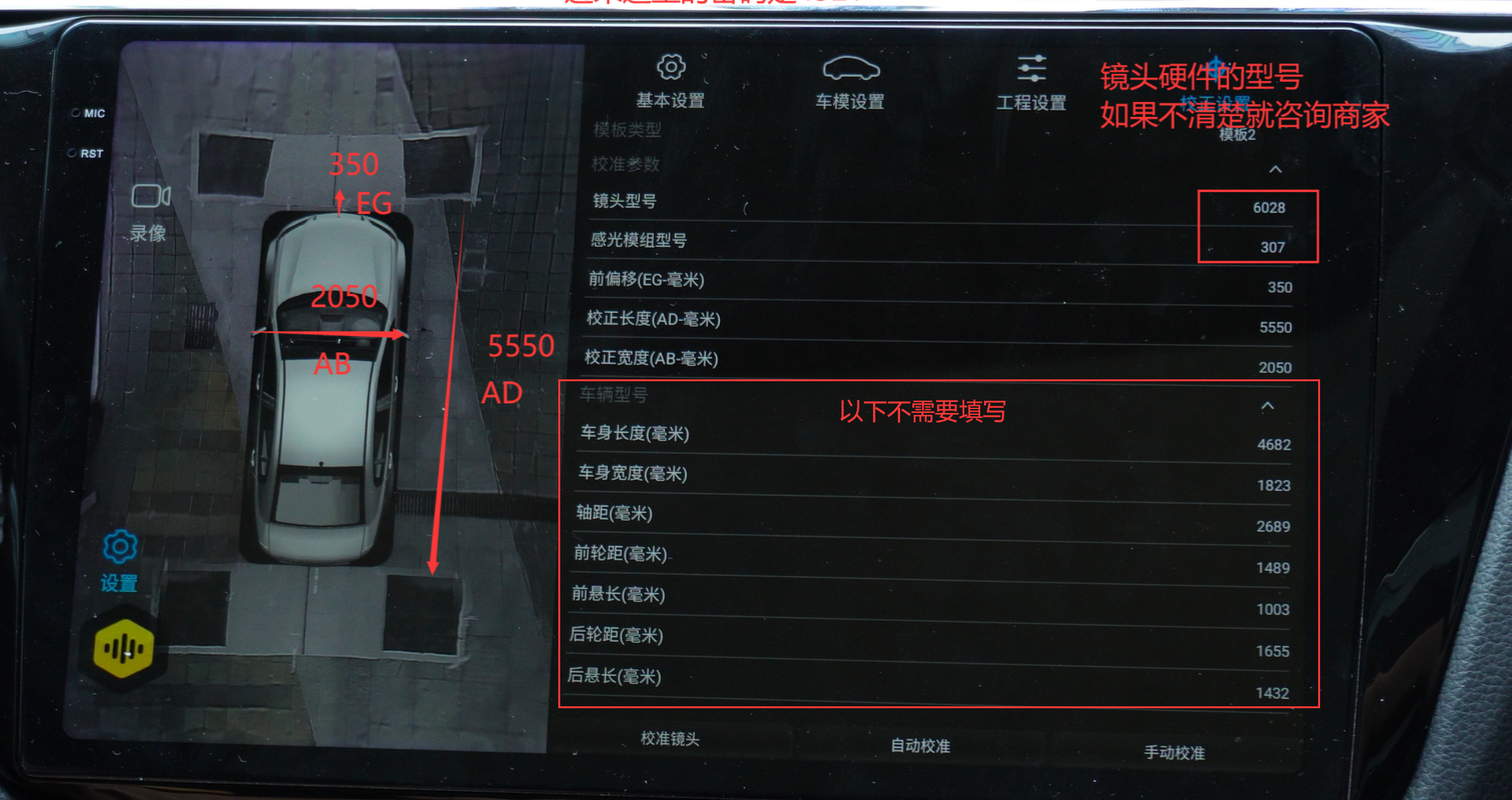
4. 用卷尺对准标定布上指定位置,测量并记录如下三个数据:
AD=前后布内边缘间距, AB=左右两摄像头间距, EG=前偏移
5.进入校正设置(密码:654321,后面改为4321)):
6. 全景调校
A. 输入相应的摄像头镜头(Lens)规格;
B. 输入前偏移距离,左、右间距(单位mm);
C. 输入车型关键字,并在联想出来的相关车型列表中选择最拼接当前车型的一项;
D.选择自动拼接,等待30S左右,提示拼接成功后可以正常使用;
7.为防止数据丢失,可以把拼接好的数据保存(工程设置导出参数,存入整机里)
8.当自动拼接失败的情况下,可以通过点击自动按钮旁边的手动校准按钮,使用手动描点方式完成拼接:

9.如上图,直接点击红十字点或下一点进行点的切换,拖动点进行大概位置的描点,在放大镜窗口拖动可以进行对应点位置的微调,当点均精确对准后,点击确定进行下一幅图的描点。
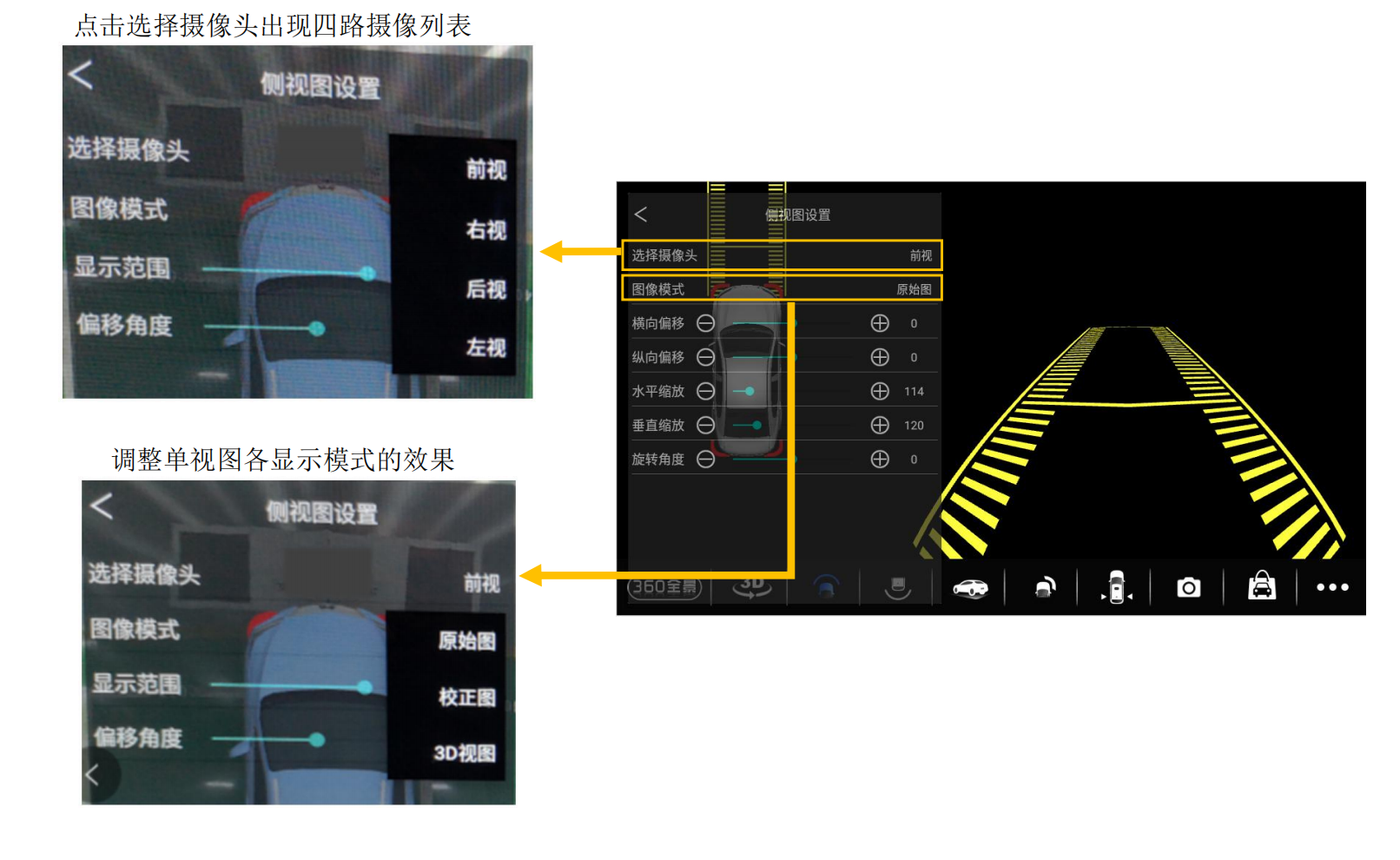
360全景(灵动飞扬)设置解析
主页面:

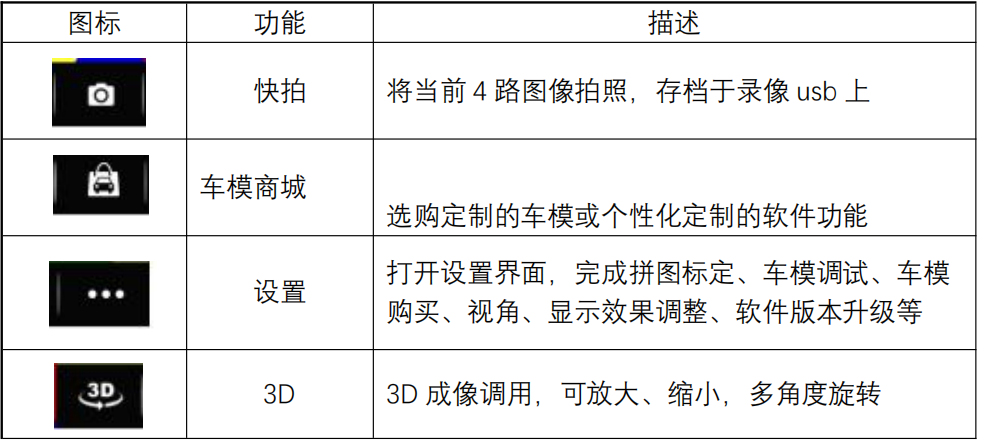
按钮注释
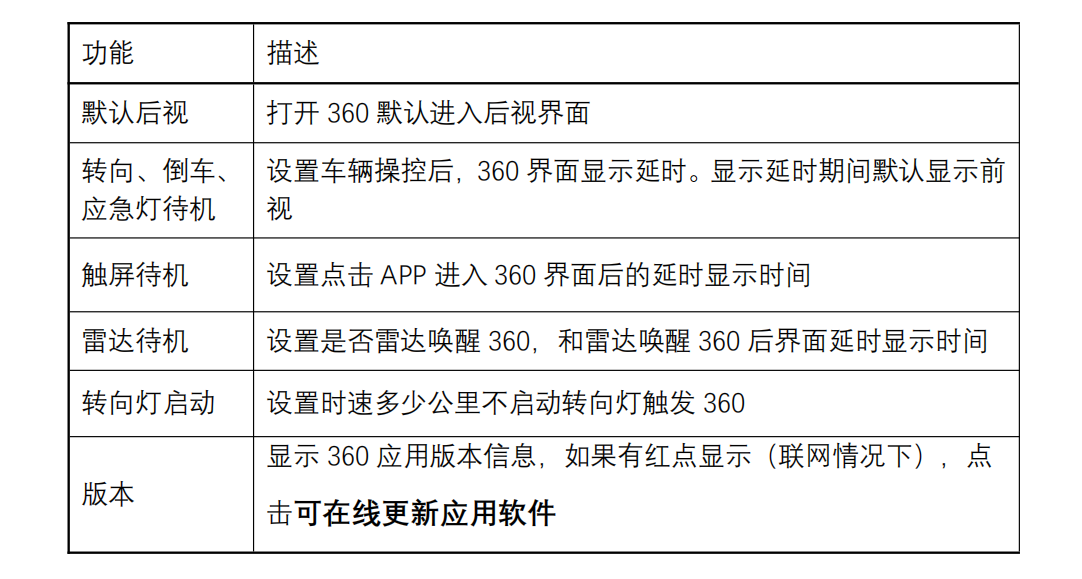
基础设置

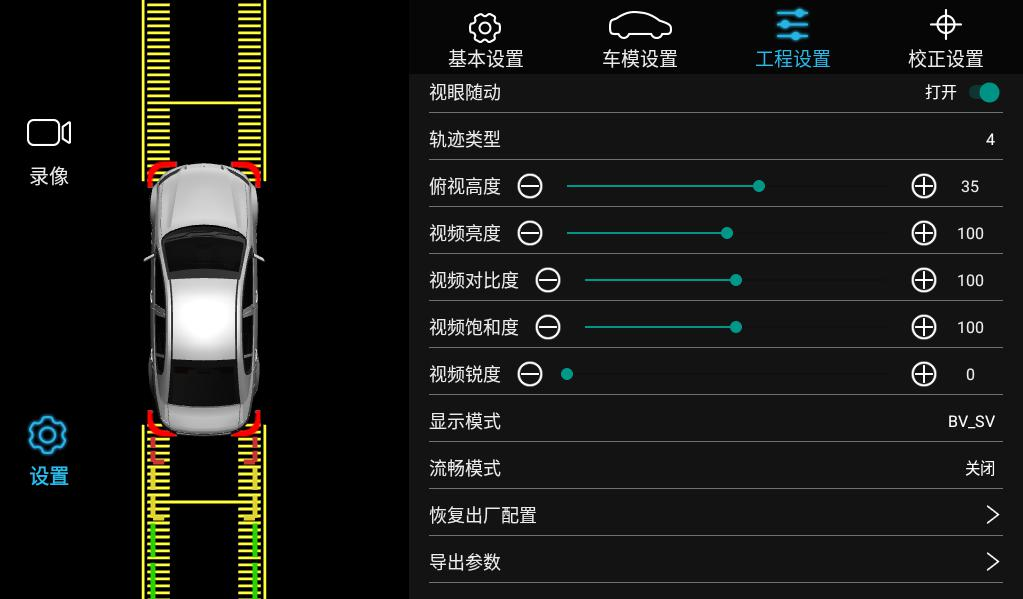
工程设置
软件如何在线升级?

360全景有哪些语音指令?
鼎微方案的360一体机支持小蜜语音指令。
用语音来操控360全景的画面

全景录像如何实现录像?
1、准备U盘
推荐使用品牌U盘,相对稳定,关键时刻起作用
16G、32G、64G、128G
2、将U盘接入车机
把U盘接到车机的USB里面

3、打开录像状态
路径是:360全景→基础设置→打开录像状态

4、选择存储路径
U盘接在哪个口,就选择哪个路径就可以了

设置完了以后,你就可以看到左上角有个红点在闪烁
说明目前是正在录像的状态
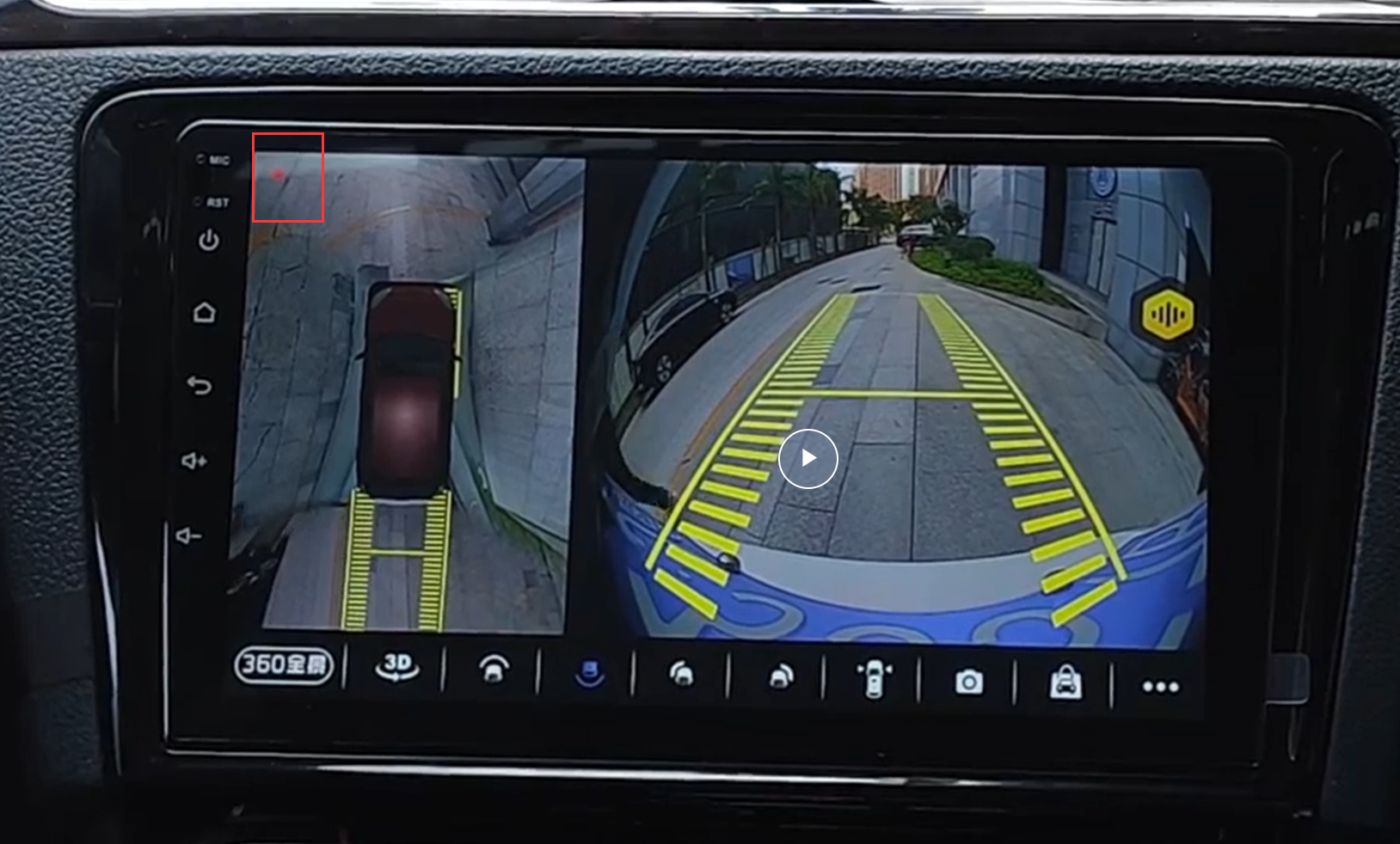
5、查看录像
最后,在录像这个位置,就可以查看我们四个镜头录制的画面了

四个镜头的画面

6、停车监控
进入路径车载设置→通用→打开停车监控(设置仅当次有效)
耗电量:每个小时在800~1000毫安。

可能遇到的问题:
出现两个360模型
问题现象:出现了两个车子的模型,如何关闭?

这是由于车机自带的360模型,和原车360模型都开启了。
我们需要关闭原车360模型。
在桌面上找到车辆设置这个软件

具体会在360的其中一项可以把车模去掉
原来有360全景,更换车机后是否兼容?
情况:
原来已经有360全景影像,现在更换车机,担心是否兼容旧的360全景影像?
具体分情况,不同情况,是不一样的
拿兜风车机来举例,兜风车机是基于TS10平台的360一体机,
什么是360一体机?
不需要另外加装协议实现,其主机能直接解析思路镜头的安卓车机。
你目前用的360种类是哪种类型?
1、加装的鼎微360一体机
可以兼容
代表::T5/T7的鼎微方案360一体机
此情况为同方案切换,是可以兼容旧的360全景镜头
需要注意:
a、如果使用的软件相同
这种情况只需要把旧车机的拼接数据的导出来。
接着新主机到了以后,在把拼接数据导入到新的车机就OK。
具体方法看:http://new.dofun.cc/wiki/42265/51908
b、如果使用的软件不同
软件算法不同,不能沿用旧软件的拼接数据。
需要重新拼接
拼接数据教程在:http://new.dofun.cc/wiki/42265/48304
2、通过360盒子实现的360全景
可以兼容
代表:360主机盒
解析:此360盒子通常不限车机、方案,只要有倒车输入口(莲花口),就能实现。

注:解码盒的,不论车型、不论车机方案,只要有360解码厂有解码过,就能用。
接口是莲花头的即可
3、原车自带360全景
可以兼容
代表:丰田RAV4原厂自带的360全景

原车出厂自带360,只要车机方案公司和协议盒厂调试过,就可直接用原车360,不区分车机平台。
4、加装的非鼎微方案360一体机
不是鼎微方案的主机
不能直接兼容
解析:
需要重新弄硬件定义+重新拼接。
现在用的是非鼎微方案的360全景一体机,换鼎微方案是无法兼容
反之,现在用的鼎微方案,换其他方案的360一体机,同样不兼容
重新弄硬件定义。
如更换的车机是鼎微方案的主机,则需要遵循此定义才能连接
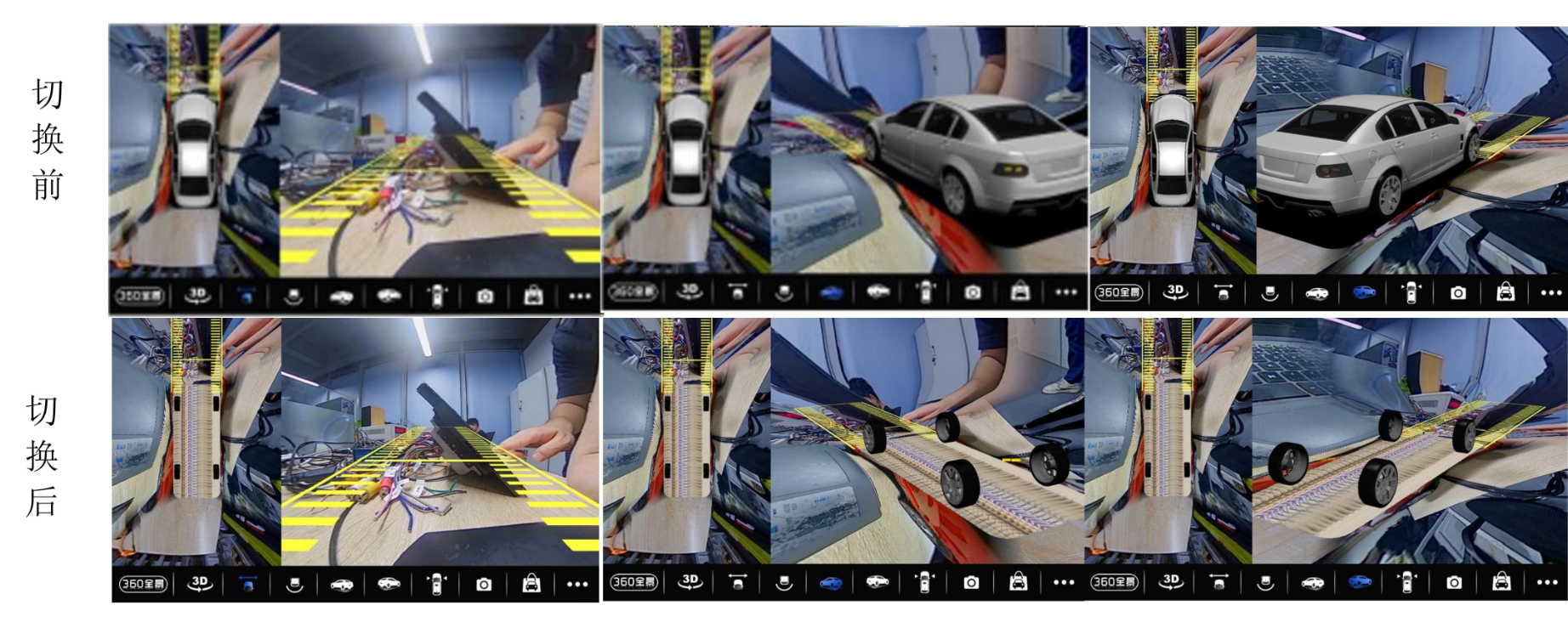
出现透明车模
透明车模:
360透明车模切换方式
系统版本:T5Q.2.1_ 20210923.094624 AUTOUI
T5Q.2.1_ 20210923.103740THEME1
360版本: 2.21.485
切换方式:通过点击360 界面中“360全景”Logo,切换车模显示方式

这个人很懒~
LV5 等级
171 粉丝
263 获赞
8181 经验